Funded by the National Science Foundation of China project “LIDAR/Camera Data Based General Purpose Feature Extraction and Evaluation for Localization”, Robot Sensor & Human-machine Interaction Lab achieved a breakthrough on the data association problem. The proposed algorithm was published on IEEE Transaction on Industrial Informatics and Associate Professor Yangming Li is the first author. The data association problem is the core of decision making. In the mobile robot community, data association is used for finding out correlations between observations achieved at two different time points. The data association problem intrinsically has exponential computational complexity. Therefore, the traditional data association algorithms have either the high computational complexity or the low association accuracy. Posterior based association exploits the conditional independence between observations from two time points, and therefore it decreases the computational complexity from T(n3)to T(n2), while the accuracy of the proposed algorithm is higher than that of the traditional algorithms. 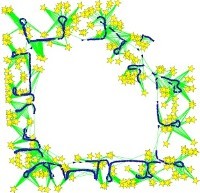 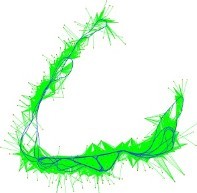 Fig. Posterior Based Data Association on Intel Research Center and Victoria Park Dataset Moreover, the project also applies recurrent neural networks for the non-linear control problem. The algorithm was published on IEEE Transactions on Neural Networks and Learning Systems( vol.24, no.2, pp.301-309). 11 research articles were founded by the project in the past year (8 SCI indexed and 1 EI indexed). Almost all problems in the project are solved. |

