The water quality detection and sampling technology of the existing domestic water robot can only detect the conventional water quality parameters by on-line detection. Since it is difficult to detect the organic substances, nutrients and heavy metals comprehensively in the water, the water samples can only be collected and detected in the laboratory. Thus, the in-situ and real-time detection of heavy metals and other important pollutants in water can’t be realized. In addition, the existing technology can only detect the shallow water, but it can’t detect the distribution of the water quality at different depth levels in the water.
Recently, Prof. LIU Jinhuai’s group of Institute of Intelligent Machines(IIM),Chinese Academy of Sciences (CAS), developed the autonomous surface vehicle (ASV) using wind and solar hybrid generating system and it is applied on the water surface float automatic cleaning, automatic oil removal and in-situ water measurements, etc.
The ASV has absolute advantages compared with the existing water unmanned surface vehicle. The power is derived from the large capacity battery, wind and solar power hybrid Generating System to solve the motive forces problem of the long duration cruising for surface robot. The two-mode target recognition method based on vision and radar is employed to develop intelligent algorithm for the water path optimization and autonomy avoidance, which solves the problem of the robot global path planning and local real-time obstacle avoidance problem. Moreover, the ASV has integrated multi-mode navigation system, the three dimensional electronic compass, drive automatic control of motor speed control technology, high bandwidth wireless data real-time transmission technology and artificial intelligence technology. Consequently, the automatically controlling problem of the surface targets is solved.
Combining the development of a new type of small heavy metal detection equipment, different depth of water quality automatic sampling device and water quality in-situ on-line detection device, the project takes the water surface vehicle as the platform to achieve the three-dimensional section in-situ and real-time detection and pollution state analysis of water quality. Moreover, the water quality monitoring instrument developed by the water vehicle is state-of-the-art and it is integrated into the surface of the water robot platform to build mobile water quality monitoring laboratory that can replace the current water quality monitoring station or monitoring buoy to achieve in-situ monitoring and early warning in any water and all-weather with low cost water quality
Taking the ASV as the common platform, researchers have developed surface autonomous trash-cleaning robot, which consists of surface float automatic recovery device and the ASV. Similar to house cleaning robot, it is mainly used in sea, lakes, rivers, beaches and scenic lakes, ponds, and other solid waste disposal. It can be used in danger zone as well by remote operations for safety and efficiency.
Furthermore, the researchers have also developed an efficient reusable super hydrophobic lipophilic material with low cost. Through the combination with this material, surface vehicle can automatically identify the oil spill water, autonomous cruise, automatic cleaning and recovery of spilled oil. Thus, the cost is saved, and the efficiency and automation level are improved. At present, IIM has formed a prototype, and actively promotes the industrialization process.
The study has recently reported by Xinhua Net, China News Network, People's Daily, CCTV network, Anhui Daily and other media and newspapers, causing widespread concern.

Autonomous Surface Vehicle (ASV)
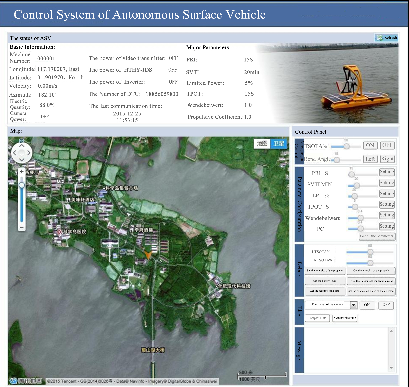
Interface for Control System of Autonomous Surface Vehicle
Dr. Yu Daoyang,
Hefei Institute of Intelligent Machines Mechanics,Chinese Academy of Sciences
(http://www.iim.cas.cn/)
Hefei, Anhui 230031, China
Tel:0551-65592385
E-mail:ydy@iim.ac.cn
Image by YU Daoyang

